Waymoの行動予測モデル(Waymo at CoRL 2022 | Behavior Models for Autonomous Driving)
記事の概要
- 2022年のConference on Robot Learningという学会でのWaymoの研究部門の責任者であるDrago Anguelov氏の講演内容をまとめます。
- 動画中で多くの論文が紹介されていますが、本記事では概要にとどめて詳細な解説は別の記事に譲ります。また、本講演は行動予測モデルと自動運転車のプランニングを含みますが、本記事では前者のみを取り扱いますのでご了承ください。
- 既に一部地域で自動運転サービスを開始しており、その様子が動画の最初の方にありますので視聴をおすすめします。
動画の概要
- 自動運転で特に難しいドメイン固有の問題を"Diverse and Complex Multi-agent Interactions"(多様で複雑な複数のエージェントの相互作用)と捉えており、彼らはこれまでの走行で得てきた大量のデータを用いて解決しようと考えています。
Behavior Prediction
Scalable Modeling Architectures
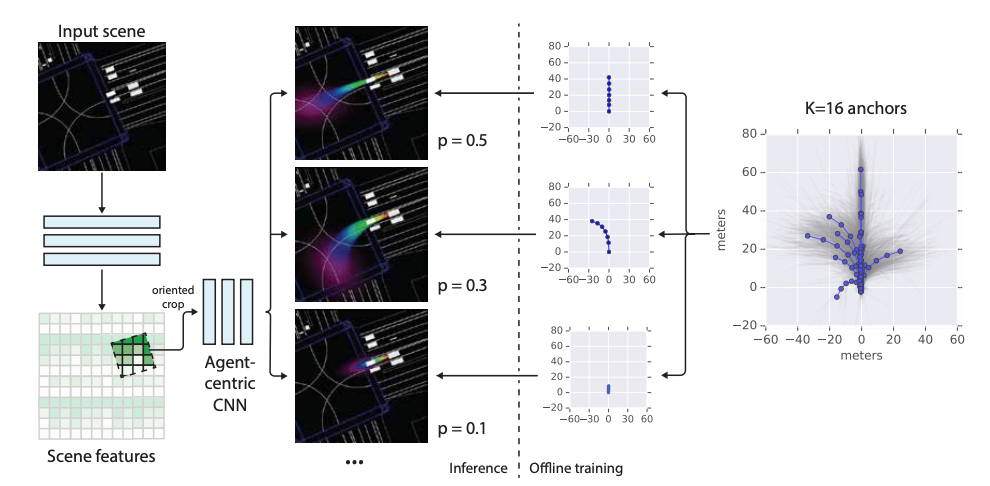
- 以下の論文ではレーンや自動車を線で描画したラスター形式の入力でCNNを用いて各agentの行動を予測しています。事前に16通りの行動パターンを容易しておき、それぞれに対する確率を出力しているようです。
- ラスター形式はより精度の高い入力にするとその分計算量が増えること、またCNNでは長距離の依存関係を考慮するのが難しいという課題がありました。そのため以下の論文ではtrajectoryや地図情報をベクトル形式で表現し、グラフネットワークを用いるという手法をとっています。
- その後の様々な改良を加えたモデルが以下の論文です。性能は良いものの、モデルが細かいブロックに分割されており、それぞれのドメインに対してエキスパートが必要な複雑な構造になっています。
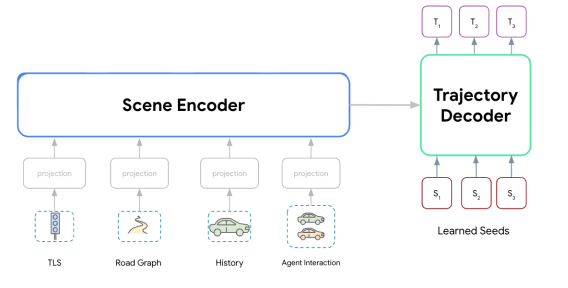
- シンプルで精度/latencyのトレードオフの調整が簡単で、かつスケーラブルなモデルを目指した研究が2022年に発表された以下の論文です。Transformerをベースにしたシンプルなモデルになっています。


Modeling Interactions
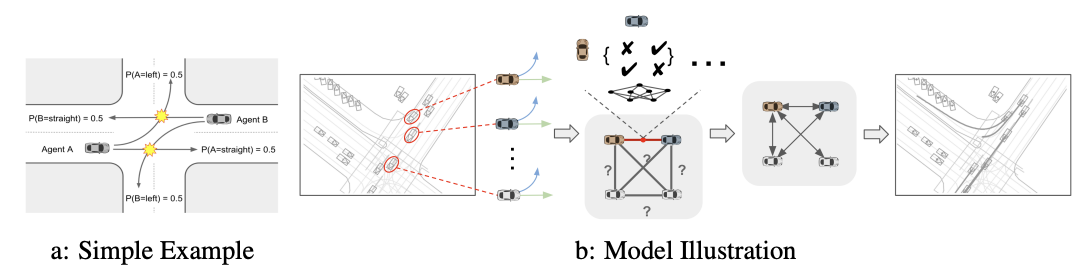
- これまではモデルのアーキテクチャに着目してきました。モデルの出力は各agentの確率的に表現されたtrajectoryですが、これらの出力からagent同士が衝突するかどうかをどのように考慮すれば良いかというのが次の問題です。
- 2022年に発表された以下の論文では、agentのペアの相互作用を考慮したend to endモデルを提案しています。
感想
- とても情報量の多い講演でした。今回は自分の興味があるbehavior modelsを追うだけで精一杯ですが、また機会があれば後半の方もまとめたいと思います。
- 最新の研究だけでなく、これまでの研究も紹介されていたのがとても良かったです。そして最後はTransformerに行き着くというのも面白い。本当にあらゆる分野で使われていますね…